![]()
![]()

トップページ > 大学の技術・ノウハウ > Mckibben型人工筋肉の8倍以上の出力密度がある 低コスト・高耐久性を実現する軸方向繊維強化型人工筋肉

| 資料 | |
|---|---|
| 組織名 | 中央大学 理工学部 中村 太郎 教授 |
| 技術分野 | ものづくり , 医工連携/ライフサイエンス |
| 概要 |
空気圧ゴム人工筋肉は、ゴムなどの弾性材に空気などの流体を注入して動力を得るアクチュエータの一つであり、Mckibben型人工筋肉が代表例です。中村研究室では、Mckibben型人工筋肉と比較して8倍以上の出力密度があり、低コストで高耐久性を実現する人工筋肉を開発しています。人体装着型パワーアシスト装置や医療・リハビリテーションなどの駆動装置に活用可能です。水中や粉体中の環境下でも駆動可能なため工場内の空気圧シリンダ等の代替にも適用できます。本技術の製品化・活用に意欲がある企業を歓迎します。 |
| お問い合わせ |
この技術・ノウハウに関するお問い合わせ |
| 詳細 | |
【簡略図】

【背景】
空気圧ゴム人工筋肉は、ゴムなどの弾性材に空気などの流体を注入して動力を得るアクチュエータの一つです。軽量で出力密度が高く、メンテナンスフリーで柔軟な特性を持っています。現在、学術界や産業界で広く利用されている空気圧ゴム人工筋肉として、Mckibben型人工筋肉が挙げられます。しかし、本人工筋肉は収縮率が20%程度と人間の筋肉の収縮率に比べて若干小さく、またゴムチューブとスリーブがすれることによってゴム自体が摩耗することから寿命が短い等の欠点がありました。
中村研究室では、Mckibben型人工筋肉と比較して8倍以上の出力密度があり、かつ低コストで高耐久性を実現する人工筋肉を開発しています。リハビリテーションロボットや人体装着型パワーアシスト等、人間に直接接触する機会の多い機械システムに適したアクチュエータとして活用可能です。水中や粉体中の環境下でも駆動可能なため、工場内の空気圧シリンダ等の代替にも適用できます。
本技術の製品化・活用に意欲がある企業を歓迎します。
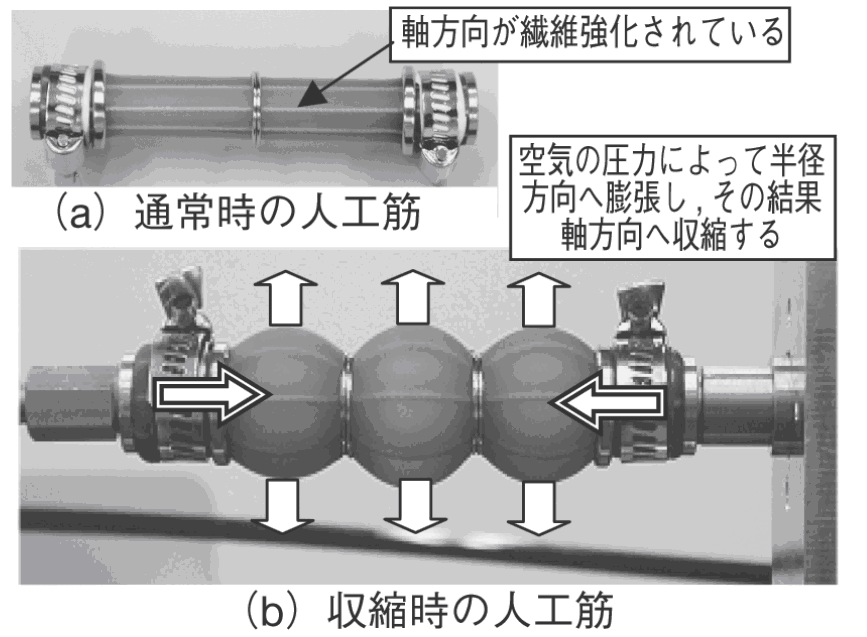
【技術内容】
本人工筋肉の収縮メカニズムは、強化繊維でゴムチューブの軸方向を拘束することで、流体の圧力をダイレクトにアクチュエータの収縮力として伝達することができます。
空気圧の供給によって、チューブの内圧が軸方向では無く、半径方向のみに伝達します。ゴムチューブは半径方向に大きく膨張し、軸方向へ収縮します。
チューブに外挿するリングの数によって収縮時の膨張を抑制することが可能です。
下記の(a)が空気圧を入れる前、(b)が空気圧を入れた後です。
Mckibben型空気圧人工筋肉の原理が下記左図、本人工筋肉の原理が下記右図です。
Mckibben型空気圧人工筋肉は空気圧が四方八方に分散されますが、本人工筋肉では収縮力を1方向のみに凝縮しています。

主な素材はゴム・カーボン繊維のため安価です。
【技術・ノウハウの強み(新規性、優位性、有用性)】
空気圧ゴム人工筋肉の利点は以下の通りです。
・軽量でも大きな出力密度が発揮できる。
・水中で使用可能であるなど、耐環境性に優れている。
・摺動部が無いためメンテナンスが容易。
・柔軟性があり、筋特性と同様の特性を持っている。
・材料費が安価である。
本人工筋肉がMackkibben型人工筋肉と比較して優れている点は以下の通りです。
・同じ圧力下で8倍以上の収縮力(0.5MPa以上)があります。
・直径1mm程度の細径化が可能です。
・ゴムがすれないため、高い耐久性があります。
【連携企業のイメージ】
例えば下記の企業と連携可能です。
1)アクチュエータ・ロボットハンド・マニピュレータなどのロボット用制御機器の開発・販売を行っている企業
2)リハビリテーション機器・ウェアラブル機器など人間に対する安全性を重視する産業機器の開発・販売を行っている企業
3)産業用ロボット・医療用ロボットの開発・販売を行っている企業。
4)他、本技術の製品化・活用に意欲がある企業。
【技術・ノウハウの活用シーン(イメージ)】
軽くて柔らかい材料で高い動力を発生できるため、人体への安全性が求められるリハビリ機器や人体装着用パワーアシスト機器に適しています。また、粉体中や水中等の環境下でも駆動可能なため、工場内の空気圧シリンダの代替にも期待できます。
本人工筋肉の応用例は下記の通りです。設計の工夫次第で様々な用途に適用可能です。
(ロボットハンド)
ロボットハンドは、その駆動方法により、各関節にアクチュエータを内部に設置するアクチュエータ内蔵型と、ハンドの外部にアクチュエータを配置しワイヤを介して駆動させるワイヤ接続型に分類されます。前者はモータを内蔵しているため重く、関節の剛性を変化できません。また、後者はアーム部の運動に影響を受けるため構造が複雑になるという欠点があります。
そこで、軸方向繊維強化型ゴム人工筋肉を細型化したワイヤ型空気圧ゴム人工筋肉をアクチュエータとしてハンドに内蔵したロボットハンドを開発しました。
このロボットハンドは他のロボットハンドに比べ、軽量、関節が柔軟、機構がシンプル、駆動系に大きなスペースを要しないという利点があります。

このロボットハンドには、人工筋肉を用いたアクティブワイヤーを組込んでいます。
直径0.9~3mm程度と細くても人工筋肉としての収縮力が大きいため、約50Nを持ち上げることが可能です。

(ロボットハンドの写真)
ロボットハンドは、ワイヤ型人工筋肉を屈曲(指の曲げ)、伸展(指の伸ばし)に使用します。各関節に屈曲・伸展のために2本ずつ配置しています。人工筋肉を2本配置することにより、関節の剛性を高めることも可能です。

(ロボットハンドの動作原理)
(多自由度マニピュレータ)
肩3自由度、肘1自由度、手首2自由度の6自由度マニピュレータとして人間の腕に近い関節配置と駆動範囲を実現しました。軽量の人工筋肉をアクチュエータとして使用することで、マニピュレータの多自由度化に伴う重量の増加を抑えています。
駆動トルクの出力が単列では不足する場合、人工筋肉を並列に配置して補うことにしました。

人工筋肉は軸方向に収縮するため、マニピュレータはプーリにワイヤーを介し拮抗によって関節を動作させる構造となっています。拮抗筋の片方を加圧し、もう一方を減圧させると拮抗筋肉に圧力差が生じます。この圧力差によって収縮量の差が生じます。この収縮量の差分をプーリによって回転運動に変換し、関節を駆動させます。

実物の写真、内骨格構造は下記のとおりです。骨が柔らかい人工筋肉に包まれているため、ぶつかっても安全です。

従来、このような複雑な作業ができるロボットは、関節が硬く、重量が50kg以上と非常に重い欠点がありました。また、硬い構造のため人間が接触すると怪我をしてしまう恐れがありました。
本マニピュレータは関節が柔らかく、重さも2kg程度と非常に軽いため、人に安全で使いやすい、人間との協調活動に適したマニピュレータと言えます。
(MR流体を用いた人工筋肉マニピュレータ)
重い物体をマニピュレータで保持する場合には、人工筋肉が柔軟であるがゆえ、空気圧では保持部が振動してしまう欠点があります。また、より瞬間的な力を発揮したい場合、空気圧では限界があります。

そこで、空気圧の代わりにMR流体を人工筋肉マニピュレータの関節部に適用することを試みました。MR流体は磁場を与えることにより、高い応答速度(ミリ秒単位)で見かけの粘性を可逆的に変化させる機能性流体です。
MR流体を内部のディスク部周りに配置し、磁場の変化に伴いディスク部表面の粘性摩擦を変化させることで、回転動作に対し連続的にトルクを制御することが可能です。

(MR流体の概要)

(MRブレーキ)
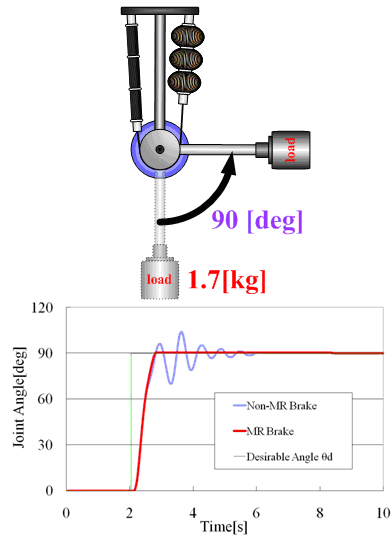
人工筋肉1自由度マニピュレータの全体図は下記の通りです。2列の人工筋肉を配置し、プーリを介して人工筋肉の収縮力を回転軸に伝達する機構となっています。
MRブレーキ装置は片側の人工筋肉に固定されており、これにより回転軸にブレーキを掛けることが可能です。関節角度を検出するためのエンコーダと、リンク先端にかかる負荷検出のためのひずみゲージを搭載しています。

下記は物体を持ち上げる実験を行ったときの結果です。
空気圧制御の場合は振動していますが(青線)、MRブレーキを利用した場合(赤線)は振動していません。
下記は物体を保持したときの実験の結果です。
ブレーキを掛けない場合には重りの負荷によりアームが落下し振動しますが(青線)、MRブレーキを適用した場合(赤線)アームの落下と振動の抑制を実現しています。

他にも様々な用途に適用可能です。
【技術・ノウハウの活用の流れ】
本技術の活用や製品開発に興味がある方はお気軽にお問合せください。
デモを交えてご紹介させていただきます。
【専門用語の解説】
(人工筋肉)
人工筋肉は、外部から何らかの制御を受けて形を変形させ、それにより仕事を行う素材の総称です。電場を掛けると収縮・伸張する圧電素子や、イオン濃度差により変形するゲル、光により膨潤・収縮する高分子なども含まれます。
本人工筋肉はゴム内部に空気圧を送ることで収縮・膨張させる機構であり、柔らかく人に安全なゴムを用いることからソフトアクチュエータとも呼ばれています。
メールフォームのご利用は、以下の項目にご記入のうえ「送信する」ボタンを押してください。
担当者より折り返しご連絡いたします。
個人情報の取り扱いについては、こちらをご覧ください。
![]()
![]()