![]()
![]()

トップページ > 大学の技術・ノウハウ > 小型・軽量・安価で日常生活動作が可能な筋電義手とリハビリへの応用

| 資料 | |
|---|---|
| 組織名 | 国立大学法人 電気通信大学 情報理工学研究科 横井 浩史 教授、姜 銀来 特任准教授 |
| 技術分野 | IT , ものづくり , 医工連携/ライフサイエンス |
| 概要 |
上肢欠損の方の生活を支援するために様々な義手が普及しており、特に筋肉の収縮によって発生する電位差を読み取ってその信号をもとに手を動かす筋電義手が注目されています。しかし今までは、手の開閉動作だけの筋電義手でも非常に高価で、利用も限られていました。本研究では、小型・軽量で日常生活に必要な動作が可能で、かつ安価な筋電義手を開発しています。腕がマヒしている方のリハビリへの応用も進めています。本研究成果の活用を希望する方のお問合せをお待ちしております。 |
| お問い合わせ |
この技術・ノウハウに関するお問い合わせ |
| 詳細 | |
【簡略図】

【背景】
上肢欠損の方の生活を支援するために義手が普及していますが、そのほとんどは外観の再現を目的とした装飾義手です。それに対し、特に筋肉の収縮によって発生する電位差を読み取ってその信号をもとに手を動かす筋電義手が注目されていますが、非常に高価かつ手を開く、握るなどの動作に限られるなど普及が進んでいませんでした。
本研究では、小型・軽量・安価で複雑な動作が可能な筋電義手の開発を進めています。腕がマヒしている方のリハビリへの応用も進めています。本研究成果の活用を希望する方のお問合せをお待ちしております。
【技術内容】
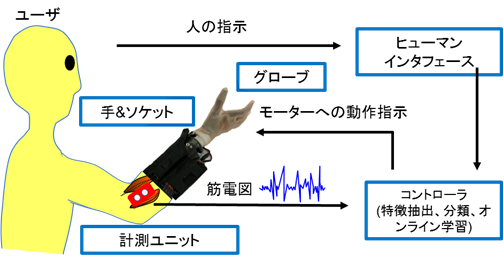
本システムの外観図は以下の通りです。
ロボットハンド、前腕用ソケット、上腕固定部の3種に分かれています。
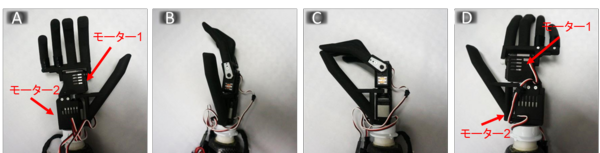
ロボットハンドにはモータが内臓しています。
前腕用ソケットにはコントローラ、電池、on/off信号が付いています。
上腕固定部には表面筋電図を読み取るためのインタフェースが付いています。
重さも数百グラム程度であり、コンパクトです。

ロボットハンド内にはモーターが2個内臓しています。
ユーザが「このように手を動作させたい」という意思の指示と、計測ユニットからの筋電信号をコントローラへ送ります。コントローラで筋電信号と意思との関係を学習したら,筋電信号より動作の意思を推定し,ロボットハンド内のモータへ指示を送り、手の動作を実現します。
【技術・ノウハウの強み(新規性、優位性、有用性)】
人が必要とする最低限の日常生活動作(Activities of Living:ADL)を行うことが小型・軽量かつ低コストで実現可能です。
1)ヒトの手は手首の動作を含めて25 の運動自由度を持っており、取り得る姿勢も多種多様です。これらを電動義手で実現するにはヒトの手と同様な自由度が必要になります。そのため、電動義手についての研究の多くは、多自由度化することでより複雑な動きを実現してヒトの手の動きや機能に近づけることを目的としています。
しかし、多自由度の制御が可能な電動義手を用いた筋電義手は実用化には至っていません。その主な要因はサイズおよび重量です。自由度に応じた数のアクチュエータが必要になるので、電動義手の多自由度化は重量とトレードオフの関係にあります。したがって,多自由度の義手は低自由度のものと比べて,片手で支えるには困難なほど大きくかつ重くなってしまいます。
本筋電義手は、日常生活動作を行う上で必要な機能を満たしながら、かつ、小型性・軽量性を両立しています。
2)既成の筋電義手は、手を握ったり開いたりするだけの筋電義手でも非常に高価であり、ほとんど普及していません。そのため、ほとんどの方が実際の手に似た装飾義手を使用しています。
本筋電義手は、装飾義手と同等レベルの価格帯を目指しています。
【連携企業のイメージ】
介護・リハビリ用機器メーカ等、本装置の事業化・普及に意欲がある企業を歓迎いたします。
【技術・ノウハウの活用シーン(イメージ)】
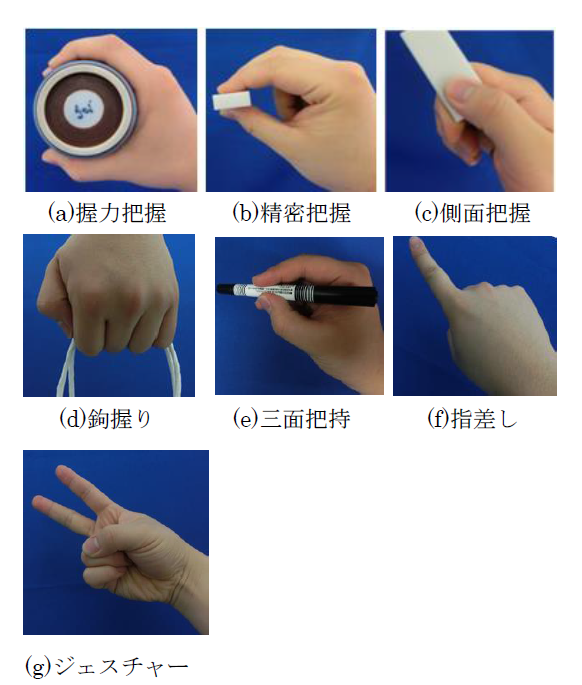
1)上肢欠損の方が本筋電義手を装着することで、日々の生活において必要な手の動作を実現できることを目指しています。人が必要とする最低限の日常生活動作(Activities of Living:ADL)を行うには、握力把握、精密把握、側面把握、鉤握り、三面把持、指差し、ジェスチャーが必要とされています。
更に、ADLのうち、握力把握が35%、精密把握が30%、側面把握が20%を占めており、これらの3 種の把持姿勢でADL の85%が可能となります。
必要な手の動作機能を最低限の自由度で満たしている電動義手は、それだけ軽量になり、日常生活で使用するには適しています。
2)手・腕がマヒしている方がリハビリ用途に活用可能です。通常、腕の麻痺が起こると手を握りこんだ状態で筋肉が固まってしまいます。この収縮を防ぐために、指を伸ばしたり縮めたりといったリハビリが行われています。麻痺した手からも微弱ながら運動信号が出ているため、その信号を読み取り、義手の技術を応用してパワーアシストを行うことで、リハビリ効果を高めることができます。
【技術・ノウハウの活用の流れ】
本研究成果の活用にご興味があればお気軽にお問合せください。技術のご紹介やデモ、ご相談など対応させていただきます。
【専門用語の解説】
(筋電義手)
義手の一種です。通常、義手は「重い」「暑い」「人から注目を集めたくない」「反対の手で代償できる」といった理由から、軽量であることや外観の再現が中心となって製作されることが多いです(装飾義手)。これに対して、外観よりも機能の再現を目指して開発されたのが筋電義手です。
筋肉は、脳から命令として発せられる微弱な電気的刺激を認識した神経から分泌されるアセチルコリンを受容体が受け止めることによって収縮します。この時発生する電位は微弱ではあるものの、体表面でも検知することができます。これを「表面筋電位」と言い、筋電義手を動かすスイッチとなります。
操作法は切断者によって異なりますが、切断してしまった部分を動かす筋をスイッチとする場合が多く、例えば手首を切断した場合、手首の掌屈(掌側へ手首を曲げること)する時に発生する表面筋電位を「ものを掴む」、背屈(手の甲側へ手首を曲げること)する時に発生する表面筋電位を「ものを離す」といったように、義手の動きと表面筋電位の発生方法に一定のルールを設けることで操作を行います。
このように表面筋電位を感知し、その出力が一定の閾値を超えることでスイッチをオン・オフさせて動作させるのが筋電義手です。内蔵されたモーターにより、ものを掴む・離すとなどの動作(把持)ができ、擬似的に本人の意思で動く手を再現します。
(sEMG)
表面筋電図(sEMG)は筋肉収縮時における、 神経・筋単位(neuromuscular unit:NMU)の活動電位の記録であり、神経・腎疾患の診断や、治療効果の判定、運動機能の評価などに広く用いられています。
メールフォームのご利用は、以下の項目にご記入のうえ「送信する」ボタンを押してください。
担当者より折り返しご連絡いたします。
個人情報の取り扱いについては、こちらをご覧ください。
![]()
![]()