![]()
![]()

トップページ > 大学の技術・ノウハウ > ドップラ速度及び多重散乱波を用いた悪天候・見通し外でも劣悪環境下でも適用可能なマイクロ波・ミリ波レーダイメージング技術

| 資料 | |
|---|---|
| 組織名 | 国立大学法人電気通信大学 情報・通信工学専攻 木寺 正平 准教授 |
| 技術分野 | IT , ものづくり |
| 概要 |
粉塵・暗闇・高濃度ガス・強い逆光等の劣悪な環境下では、通常のカメラやセンサでは救助者や障害物などの検知性能が劣化してしまいます。本研究では、UWBレーダにRPM(Range Points Migration)法という独自技術と人体のドップラ―速度の推定技術を組合せ、劣悪環境下でもリアルタイムかつ高精度に目標対象物・障害物を検知します。透過性が高く地中埋没物などの資源探査にも応用できるため、救助・資源探査用ロボットセンサや見通しが悪い車載センサ等に活用可能です。本研究を活用した製品開発に意欲がある企業を歓迎いたします。 |
| お問い合わせ |
この技術・ノウハウに関するお問い合わせ |
| 詳細 | |
【簡略図】
【背景】
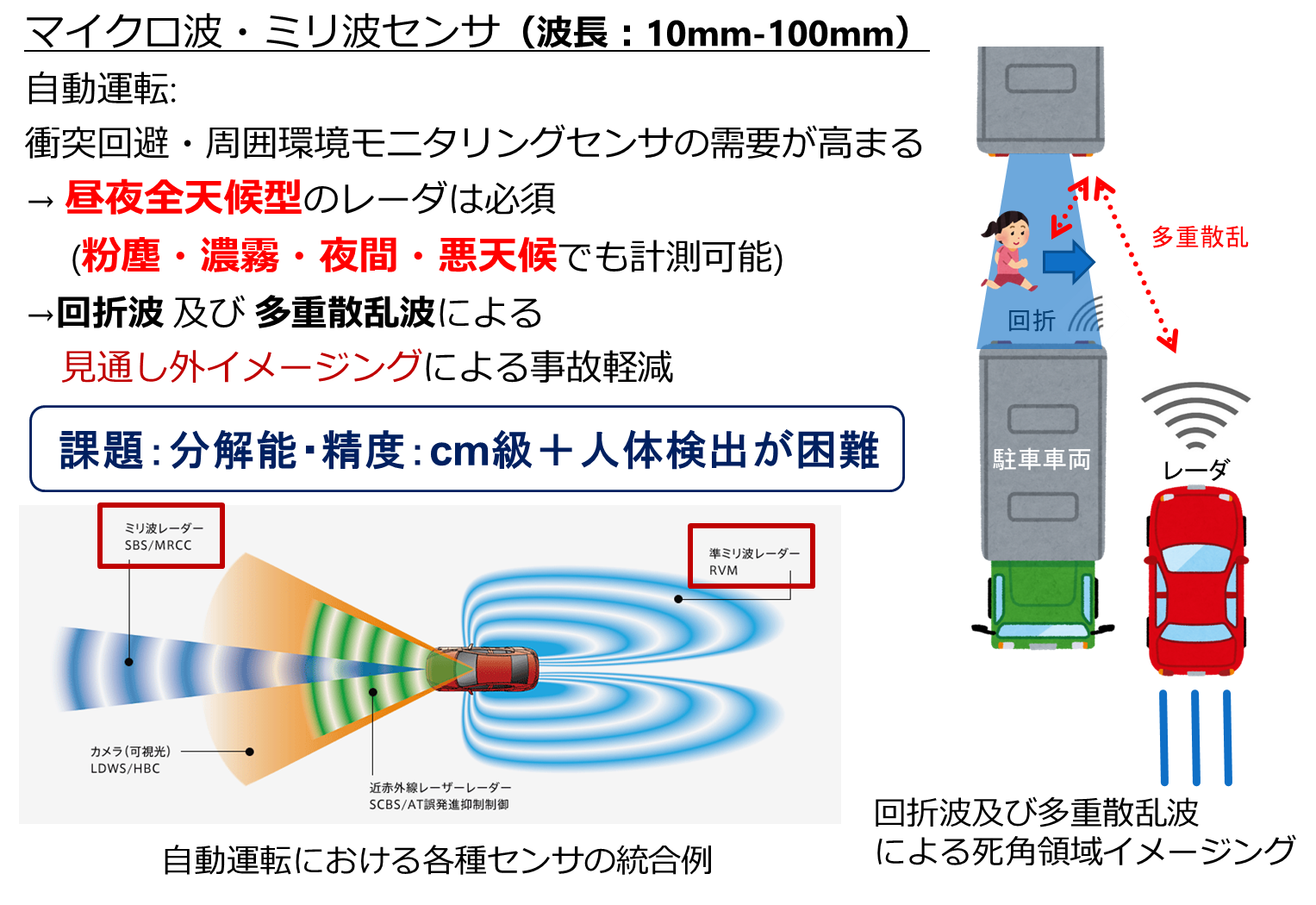
粉塵・暗闇・高濃度ガス・強い逆光等の劣悪な環境下では、通常のカメラやセンサでは救助者や障害物などの検知性能が劣化してしまいます。本研究では、UWBレーダにRPM法という独自技術、ドップラ推定技術を組み合わせることにより、劣悪環境下でもリアルタイムかつ高精度に目標対象物・障害物を検知します。透過性が高いため地中埋没物などの資源探査にも応用できるため、救助・資源探査用ロボットセンサに活用可能です。
また、波長が長いレーダは見通し外も回折して観測可能なため、例えば車載レーダなどにも応用可能です。本研究を活用した製品開発に意欲がある企業を歓迎いたします。
【技術内容】
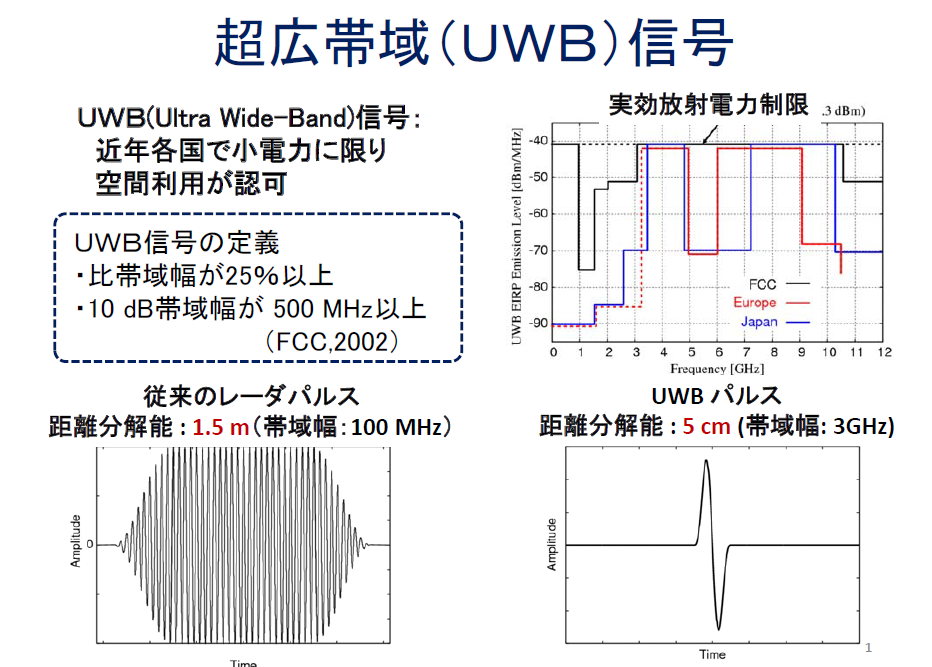
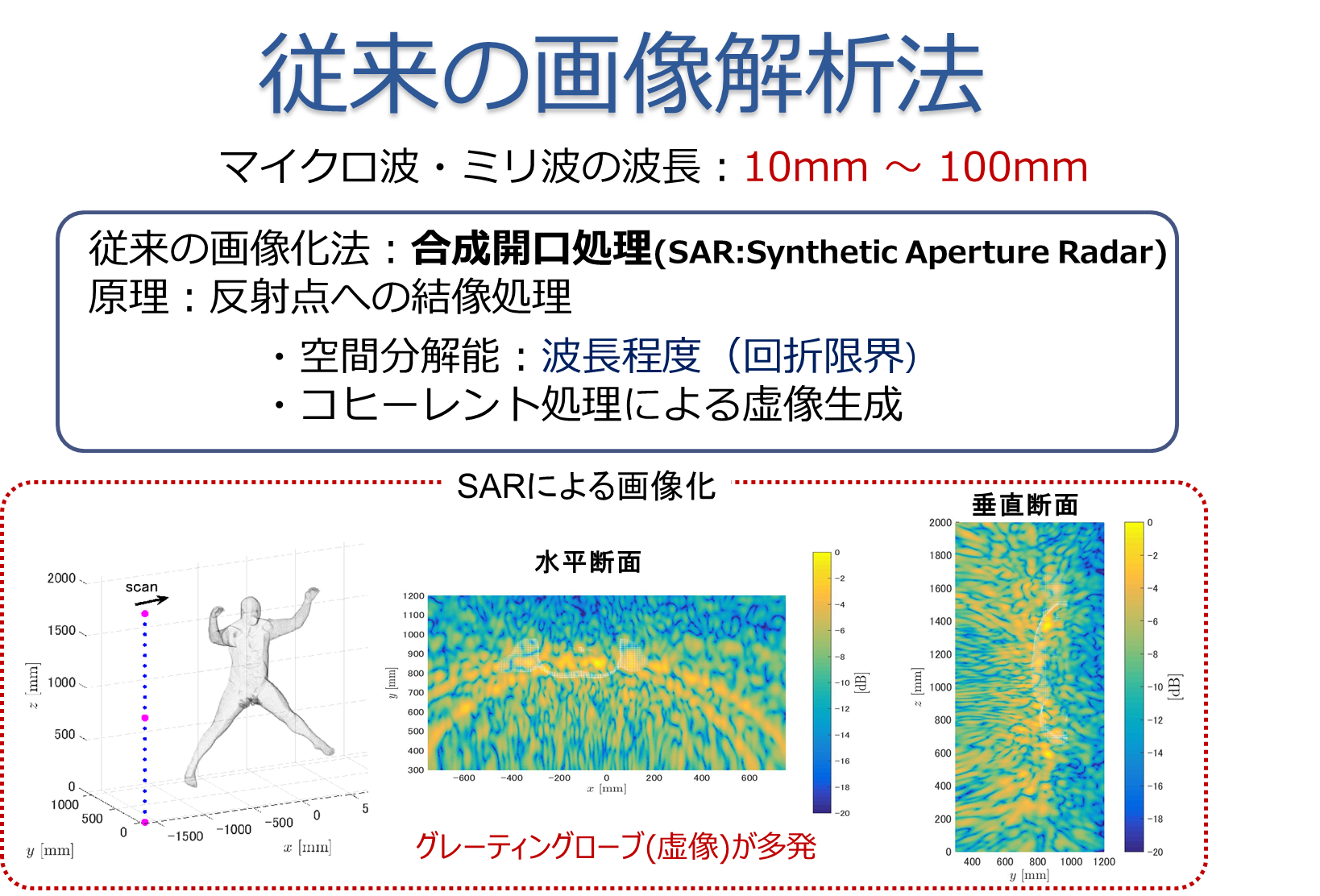
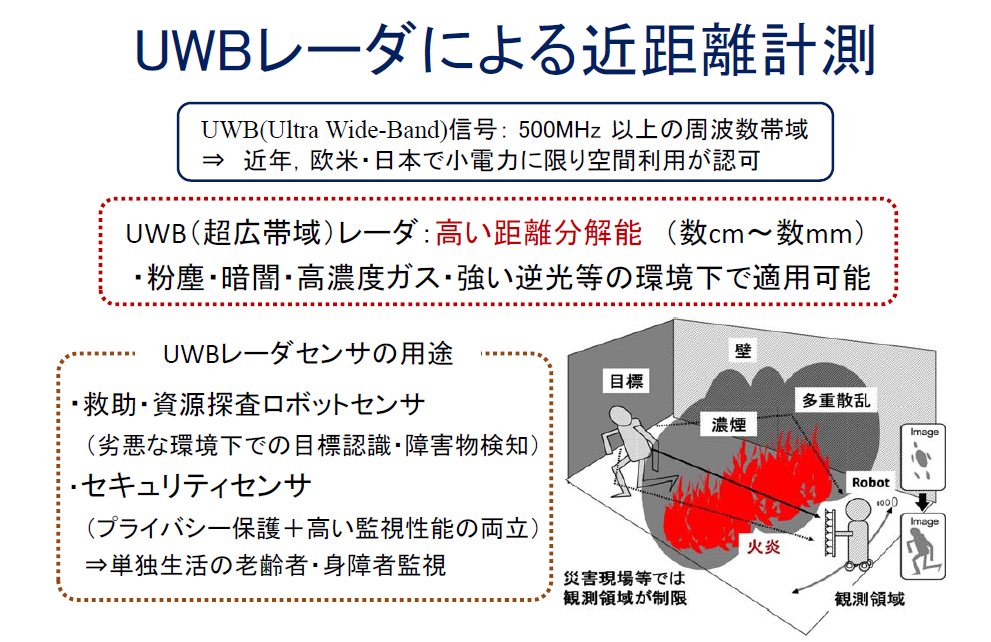
超広帯域のUWB帯を使用したレーダ計測技術を研究しています。一般的なレーダと比較し、UWBパルスでは距離分解能が数cm~数mmと高いことが特徴です。例えば3GHz帯を使用した場合には距離分解能は5cmです。

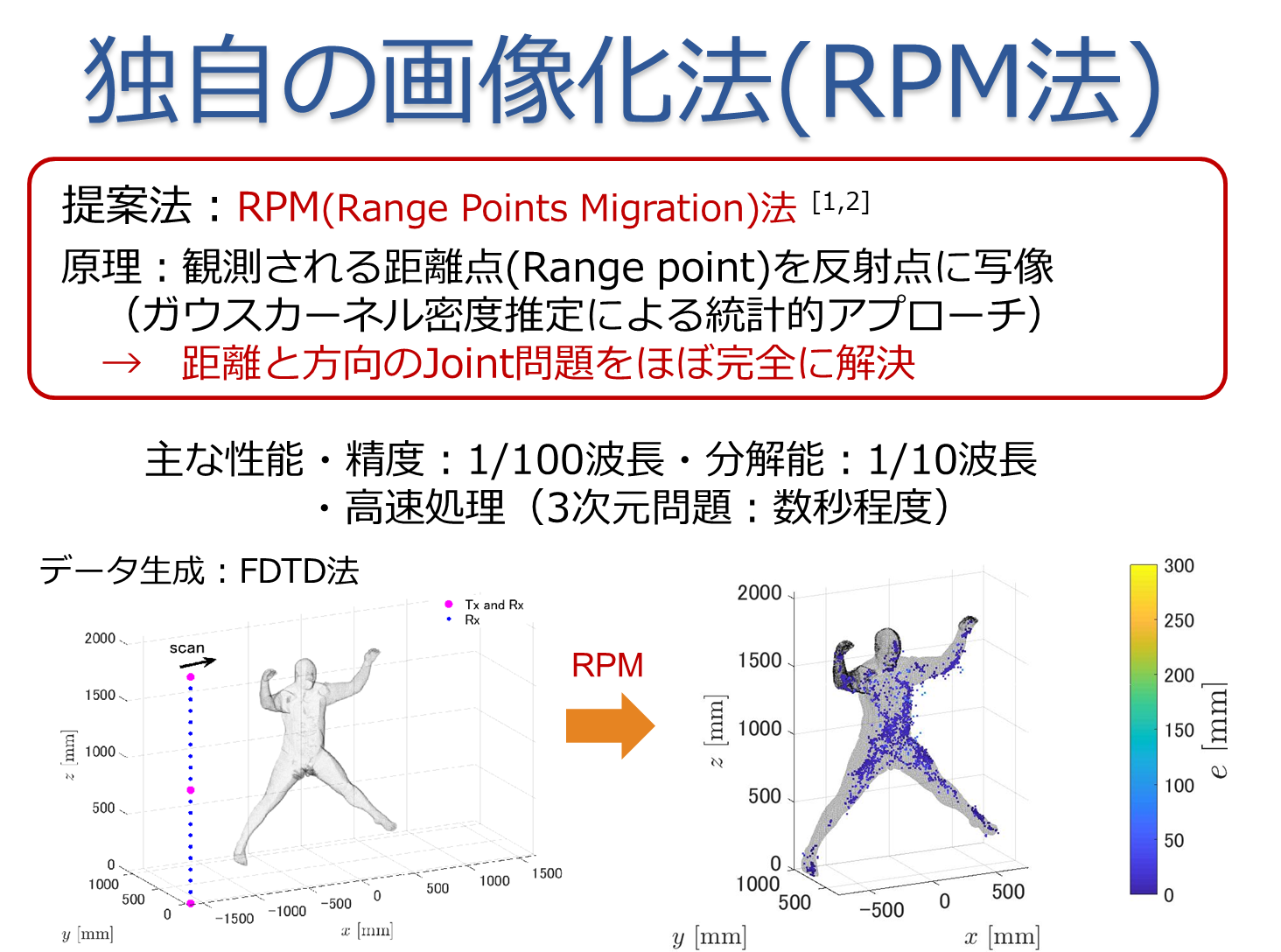
レーダを用いた画像化技術では、従来手法として「合成開口レーダ(SAR)」という手法が用いられていました。本研究では新たに「RPM法(Range Points Migration)」という手法を研究しています。比帯域が100%のモノサイクルパルスを用いた場合、その中心波長に対して、精度が1/100波長と高精度化し、分解能が1/10と高分解能化し、計算の超高速処理を実現しています。
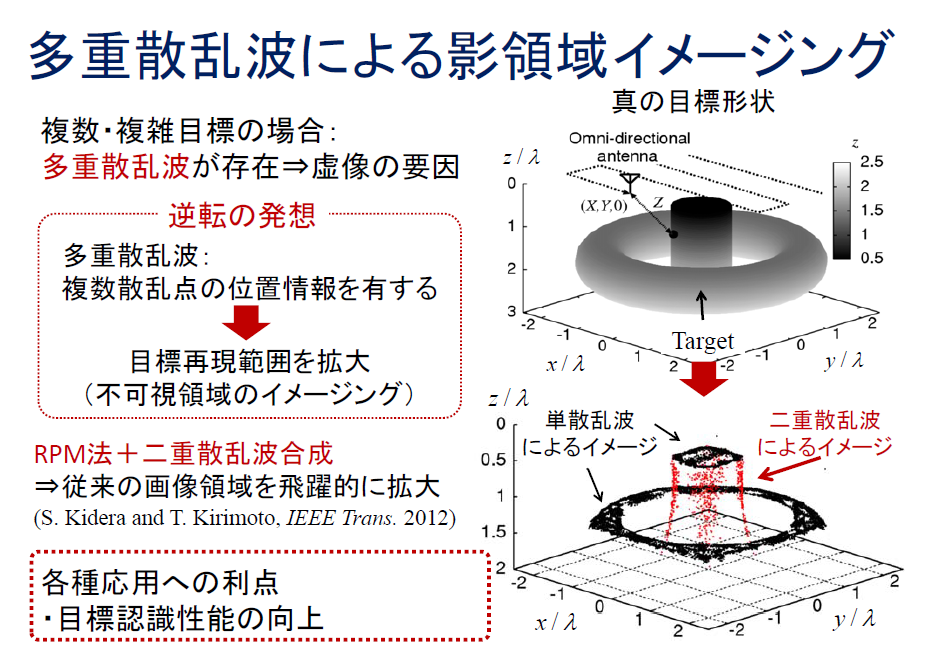
また、屋内において目標対象物が複数・複雑に渡る場合、壁にあたっての散乱が多重に発生し、虚像の要因となり、精度が劣化します。従来の手法はこの虚像を抑圧することに主眼が置かれていましたが、本研究では多重散乱波が一回散乱波にはない目標形状の情報を含んでいるという点に着目し、従来では再現できなかった影となる領域を再現させる手法を考案しました。
具体的には、RPM法に加えて二重散乱波合成という技術を考案し、一回散乱波では見ることのできなかった領域(影領域)を高速かつ高精度に推定することを可能にしました。
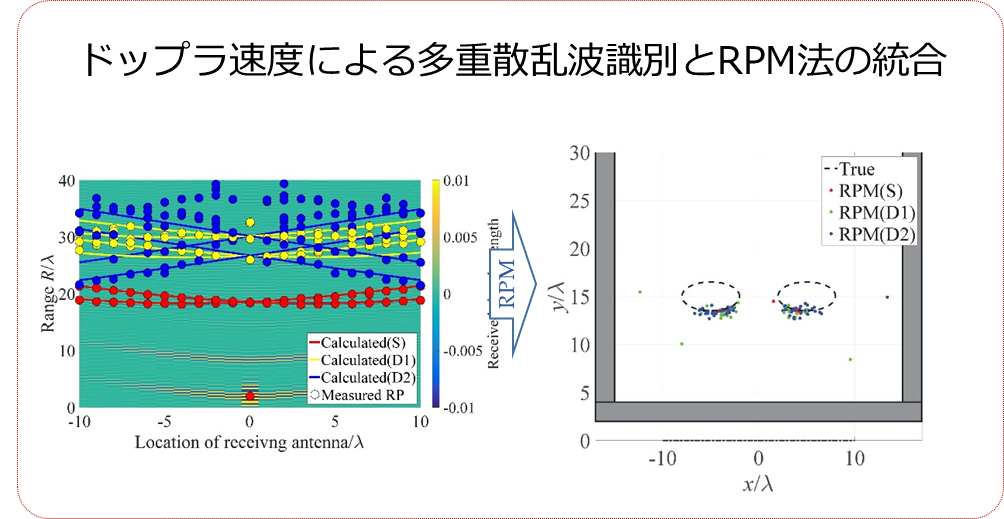
一方、上記の技術は多重散乱波の各信号が何回反射したかという情報が与えられた状況で画像化をしています。一般に反射波系のみでは、多重散乱波の反射回数を推定することは困難です。同識別のため、RPM法による推定像をドップラ速度を用いて、多重散乱波の回数を識別する方法も検討しています。下図は、壁で囲まれた人体を想定した場合に、各壁や人体の間で多重散乱が多数発生します。人体の速度ベクトルをRPM像より推定することで、伝搬経路より多重散乱回数を識別しています。これによる虚像を抑え、画像情報量を増大させることができます。この技術は特に、狭い路地での見通し外環境下等での飛び出しを事前に察知する自動運転センサ等の基盤技術として有望であると考えられます。
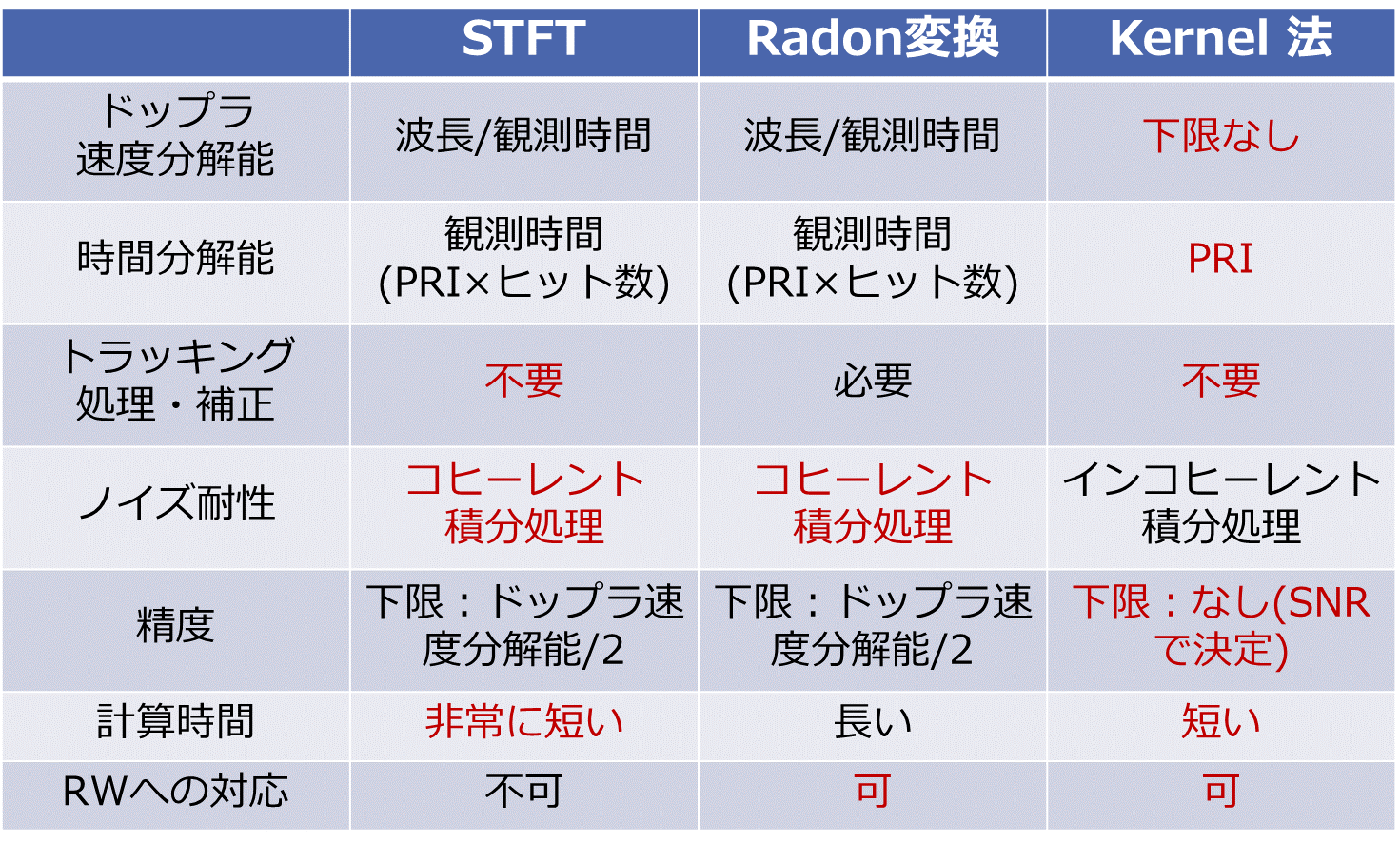
また、ドップラー速度の速度ベクトルを推定する技術により、人体とそれ以外の物体との分離検出の精度を高めることに成功しています。人間の表面は絶えず揺れており、その揺らぎ情報をマイクロ波により検知し、画像化を行う際の信号処理に応用しています。一方で、人体の各部の動きは0.1 m/s 程度の動きであり、マイクロドップラーと呼ばれ、高分解能にドップラ速度を推定する必要があります。しかし、従来のフーリエ変換に基づく手法では、特に数GHz程度の低い周波数帯では、十分な速度分解能を得ることが難しくなります。これに対して本研究室では、RPM法の原理を拡張した、ガウスカーネル密度推定によるドップラ速度推定法を提案し、フーリエ変換で問題となる時間分解能と速度分解能トレードオフを本質的に解決しました。下の図では、3つの円形状ターゲットが回転しており、ドップラ速度が時間とともに大きく変動するケースを示しています。この際に従来法であるSTFT(Short Time Fourier Transform)法では、ドップラ速度の分解能が不十分であり、また時間分解能は時間窓幅で決まるため、時間分解能及びドップラ速度分解能の両方が不足していることがわかります。これに対して、ガウスカーネル法では、各時刻のドップラ速度を逐次推定することが可能となり、高分解能・高精度なドップラ速度推定を各時刻で達成しており、従来の速度分解能と時間分解能のトレードオフを本質的に解決していることがわかります。

同手法は、ほかのRadon変換などの手法に対しても、以下の表に示す通り優位性を持っています。
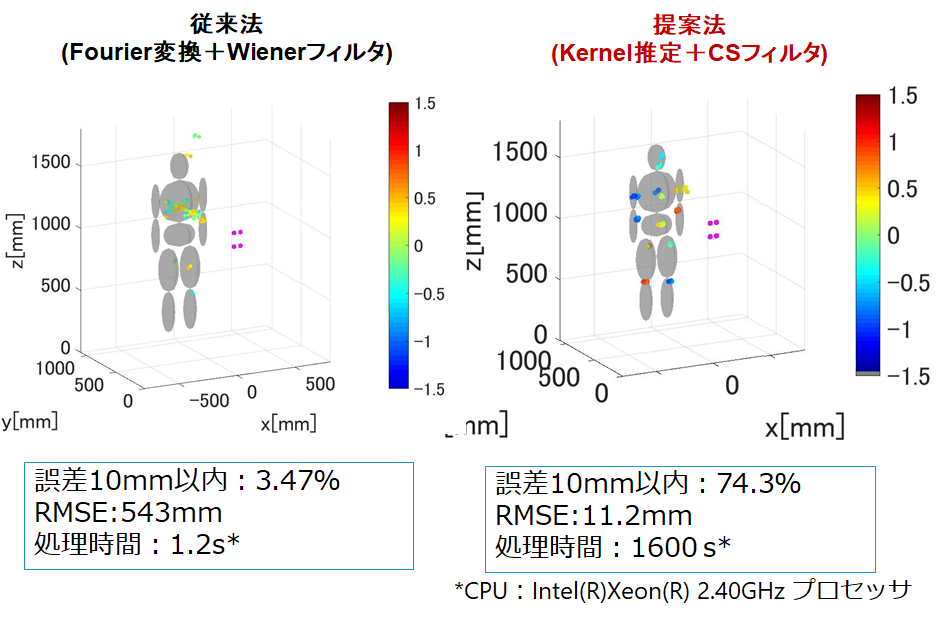
同技術は特に超分解能距離推定法である圧縮センシング(Compressed Sensing :CS)フィルタとの相性が非常に良い手法です。本研究では、kernel推定とCSフィルタという独自の信号処理技術により、ドップラー推定を高精度に行うことで、人の挙動をより細かく把握することができます。
【技術・ノウハウの強み(新規性、優位性、有用性)】
災害現場・宇宙空間等の人体にとって危険または有害な環境下で活動する自律型ロボットは、幅広い用途(救助補助・資源探査・災害復旧等)に有用であり、非常に高い社会的・産業的需要があります。
代表的な三次元距離センサであるTOF (Time Of Flight)カメラ(赤外線パルス)は、毎秒30フレーム程度の距離画像化を実現しますが、環境光に対する誤差感度が高く、また2~3m程度の計測範囲で推定誤差は10cm程度まで劣化してしまいます。
一方で、赤外線レーザいわゆるレーザレーダは、距離計測精度が高く、夜間でも使用可能ですが、悪天候下では適用が難しく、速度計測精度がよくありません。
これに対し、ミリ波レーダ技術は、粉塵・高濃度ガス・強い逆光・高熱・高圧・極低圧環境等の劣悪な測定環境下でも適用可能であり、その測距性能(数mm)は、遠方領域でも保持されます。また目標対象物と数十m~数m離れていても測定可能です。

【連携企業のイメージ】
災害救助・資源探査関連の機器メーカやロボットメーカ、レーダメーカなど、本装置の事業化・普及に意欲がある企業を歓迎いたします。レーダに関するノウハウは研究室にあるため、企業側にレーダの知見が無くても連携可能です。
【技術・ノウハウの活用シーン(イメージ)】
UWBレーダは高い距離分解能のほか、粉塵・暗闇・高濃度ガス・強い逆行等の環境下でも適用可能です。その特徴を生かして救助・資源探査ロボットセンサ等への適用可能性があります。屋内・屋外でも利用可能です。
前項の二重散乱波合成技術を用いることにより、3次元イメージングも可能です。また、その透過性を生かして地中内の埋没物の探査、金属などの資源探査にも応用可能です。他、車載レーダなどにも活用可能です。
【技術・ノウハウの活用の流れ】
本技術の活用にご興味があればお気軽にお問合せください。UWBレーダの装置デモや技術内容など詳しいご紹介をさせていただきます。
【専門用語】
(UWB(ウルトラワイドバンド))
無線通信の方式のひとつで、データを1GHz程度の極めて広い周波数帯に拡散して送受信を行う手法です。それぞれの周波数帯に送信されるデータはノイズ程度の強さしかないため、同じ周波数帯を使う無線機器と混信することがなく、消費電力も少ないことが特徴です。位置測定、レーダ、無線通信の3つの機能を合わせ持っており、独特な無線応用技術です。
(レーダ)
電波を対象物に向けて発射し、その反射波を測定することにより、対象物までの距離や方向を明らかにする装置です。遠くにある物との距離を電波によって計測し、図示することで航空機・船舶の位置把握や雨雲の雨量計測に、また物体の速度測定や障害物検知などのシステムに使われています。
(災害救助ロボット)
災害救助ロボットは、地震や水害などの災害で被災した人間を救助したりすることなどを目的として設計されたロボットです。現在開発が進められているものの多くは、要救助者の探索を目的としており、瓦礫や建物内の中を移動するための特殊な移動機構や、人間を発見するためのセンサ技術などの開発が焦点となっています。
メールフォームのご利用は、以下の項目にご記入のうえ「送信する」ボタンを押してください。
担当者より折り返しご連絡いたします。
個人情報の取り扱いについては、こちらをご覧ください。
![]()
![]()